Hi, I've been using UAVMatrix on my Nano Talon with a RPi Zero W, a 4G modem and ZeroTier VPN. I'm using Mission Planner on a PC with the video displayed in the Mission Planner HUD.


The telemetry and MAVLink communication works great and is super stable. I really like the UAVMatrix software! It works very well for me and made the setup extremely simple.
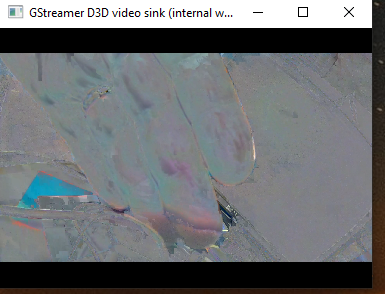
However, the GStreamer video is quite bad and a gray overlay seems to enter the image half of the time, especially when the connection is not perfect. ( Sometimes when the connection is super fast, all is good )

I've tried using the 5601 port and use a custom Gstream configuration in MP as suggested here:
https://docs.uavmatrix.com/pages/camera/Configuration/
udpsrc port=5601 caps = "application/x-rtp, media=video, clock-rate=90000, encoding-name=H264, payload=96" ! rtpjitterbuffer ! rtph264depay ! avdec_h264 ! videoconvert ! video/x-raw,format=BGRA ! appsink name=outsink
It did help a little perhaps, but it is still not possible to fly using the video, I rely on the map and cruise mode in MP.
What can I do to improve on this? Is there some way to increase the buffering? I would be happy to live with a higher latency. I do not think it is a matter of just bandwidth, I have a feeling it is related to VPN, network latency and data packets arriving at irregular intervals, but I'm just guessing. Is there some way to specify a buffer, for lets say 2 secs?
I've tried dialing down the bandwidth, framerate, resolution to a minimum, the problem is the same.
Anyone with similar problems? Any suggestions to what I could try?
Thanks!!