No solution to this issue yet?
I was trying meanwhile a lot of other GPS receivers and other hardware/software solution. Until now only the solution from Tersus which costs around 2500$ is reliable and works, but is out of budget.
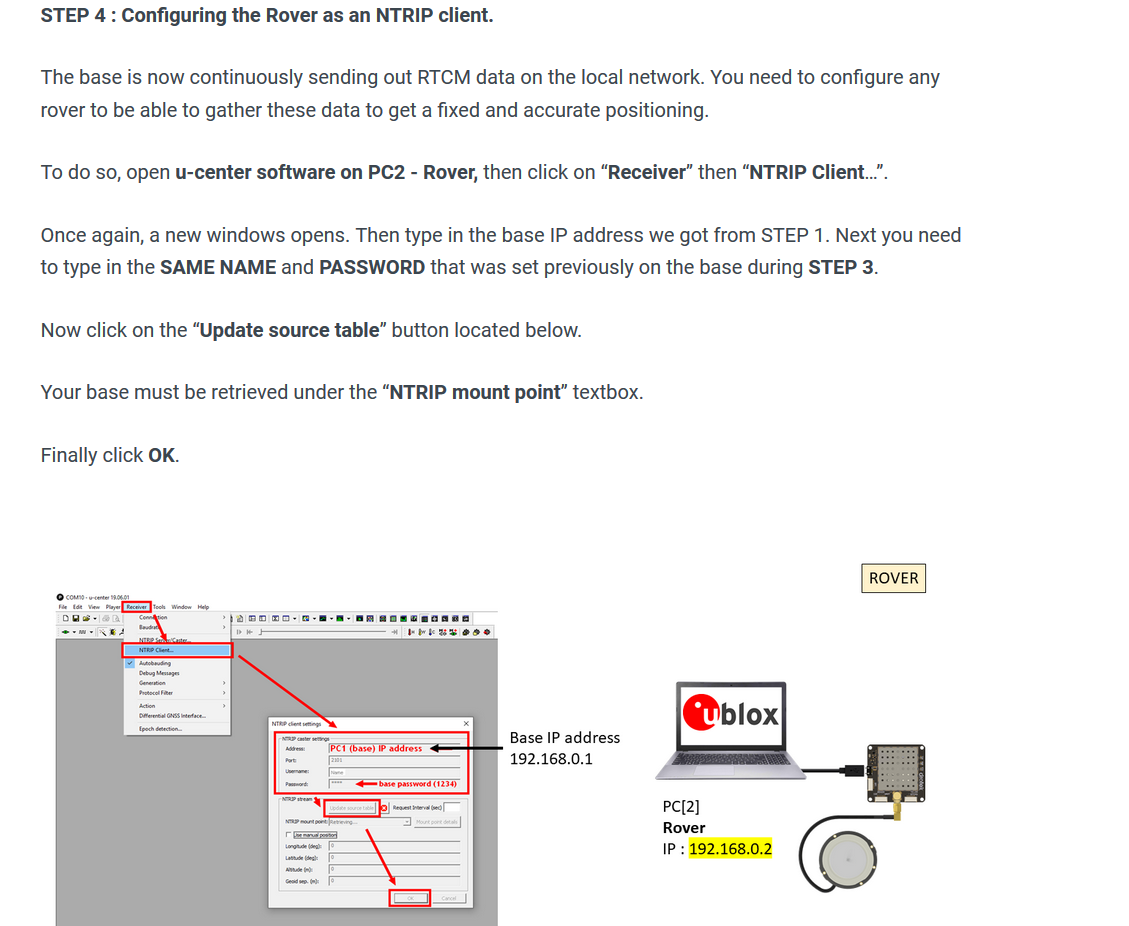
I thought that maybe you can implement in UAV Matrix software u-blox center or something, because this software from ublox has the NTRIP protocol and can cast the correction via a telemetry (needing a base) or other serial/com port.