Guys.
If anyone wants to try out my new UAVcast branch, then do these steps.
- rm -rf UAVcast/ (if you have UAVcast already installed)
- sudo apt-get update
- sudo apt-get install git -y
- sudo git clone https://github.com/UAVmatrix/UAVcast.git
- cd UAVcast/install
- sudo ./install.sh web (notice the web argument)
When installation is complete, just reboot Raspberry and access UAVcast webinterface from your browser.
http://ip_to_rpi
Compatibility Status
- RPI 0w working
- RPI 1 Uknown
- RPI 2 Working Installation time approx. 20min
- RPI 3 Working Installation time approx. 15min
If you want to disable webserver on reboot type pm2 unstartup
!NOTE:: There is no security layer added to web server yet (There will be user authentication in upcoming releases). Other people can access your webpage, so i will suggest to stop webserver before flight.
changelog
software
- ser2net updated to version 3.4
- several scripts has been refurbished.
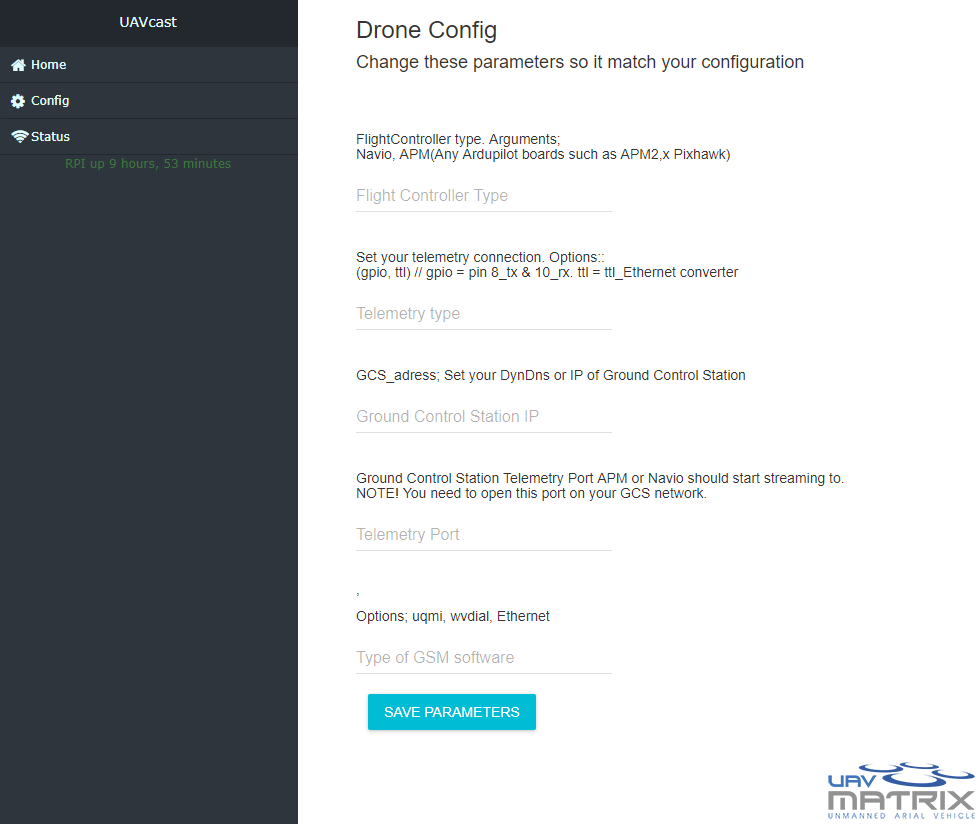
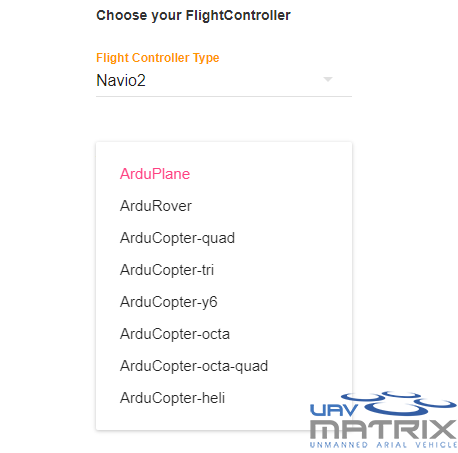
Web Functionalities
- All parameters can be adjusted
- various Information will be shown about your current config on Home page. Errors will be shown if required software not running
- Telem & Video port check to verify correct configuration of GCS station.
TODO
- update for Navio support
- security layer for web interface.
- more error handling
- more styling
- ++++++++++++++
Developing
If you want to contribute and develop UAVcast, follow these steps
- sudo git clone -b Web_UI https://github.com/UAVmatrix/UAVcast.git
- cd UAVcast/install
- sudo ./install.sh
- cd /UAVcast/web
- sudo npm install
- npm run start (this will start back end node server & front end server)
- open browser Rpi IP : 3000
https://drive.google.com/file/d/0B4xm1Z4fRFuvekxYUWFsMVNXTTA/view?usp=sharing